Drones and mobile manipulators that can throw objects in addition to picking and placing them can be highly useful in industrial automation, warehouse environments, search and
rescue operations, and sports training. However, predominant end-effectors primarily cater to grasping functions, neglecting the
throwing aspect. Currently, throwing is achieved by fast whole-
arm motion, an approach that raises concerns regarding
safety and energy efficiency. Additionally, targeted throwing poses
several challenges due to the uncertainties in model parameters
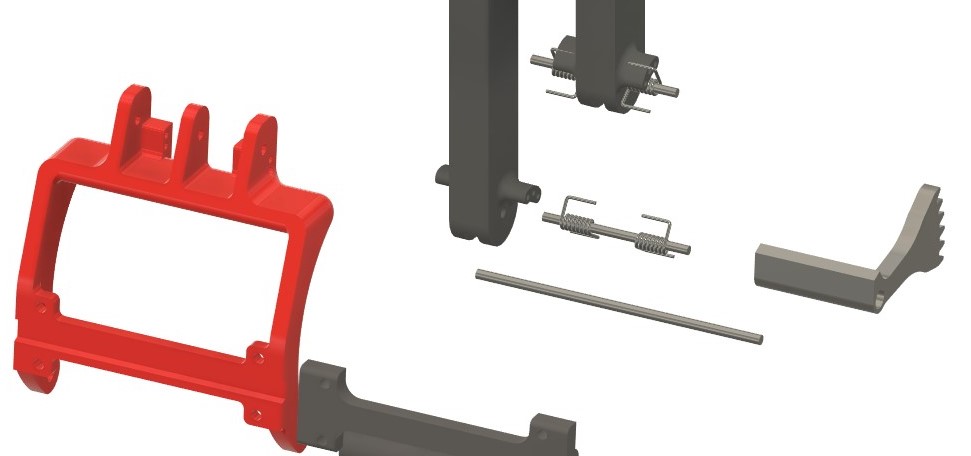
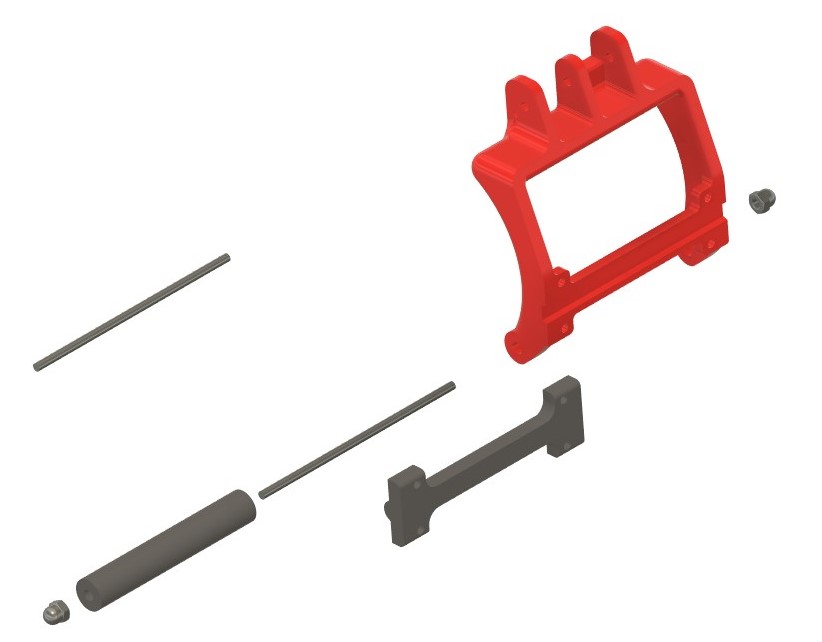
and unmodelled dynamics. This paper presents a new end-
effector mechanism that can grasp and then place or throw
an object using stored elastic energy. The instantaneous release
of this stored energy propels the grasped object into projectile
motion, facilitating its placement in a desired target location
which can lie beyond the reachable workspace of the robot
arm. We describe the mechanical design of the end-effector, its
simulation model, a system identification method to fit model
parameters, and a data-driven residual learning framework. The
residual model predicts control input residuals arising from
model uncertainties, improving targeted throwing accuracy even
with unseen objects. Experiments conducted with our robot
arm mounted end-effector show the efficacy of our end-effector
mechanism and associated algorithms for targeted throwing.
|